
自動車業界で進む、自動化やデジタル技術を活用した運転支援機能。その背景には安心安全の追求があり、自治体をも巻き込んだ事故防止の取り組みが行なわれています。
事故防止の取り組みの一つにクルマと人間のインタフェース(HMI:ヒューマンマシンインタフェース)にコミュニケーションロボットを活用する研究も行なわれています。クルマやロボットが持つセンサ機能とロボットのコミュニケーション機能が連動し、ドライバーの安全意識に働きがけを行うことで、特に高齢者の単独事故防止に役立つのではと期待されています。
研究の第一人者である名古屋大学田中先生をゲストに迎え、ユカイ工学の「BOCCO emo(ボッコ エモ)」を利用した実証実験結果や、ロボットがつなぐクルマと人間の関係性、新しいHMIについてお話ししたセミナーのレポートをお届けします。


田中:
ロボットを使った高齢ドライバーの運転支援プロジェクトについて、大きく2点にわけてお話していきます。1つ目は「運転行動改善を促すドライバーエージェント研究」、2つ目は「RHMI(Robotic Human-MAchine- Interface)に関する研究」です。
運転行動改善を促すドライバーエージェント研究は元々文科省のJST COI STREAMプロジェクトの一環で、2013年から始まりました。名古屋大学は「高齢者が元気になるモビリティ社会」というテーマで研究を進めてきました。
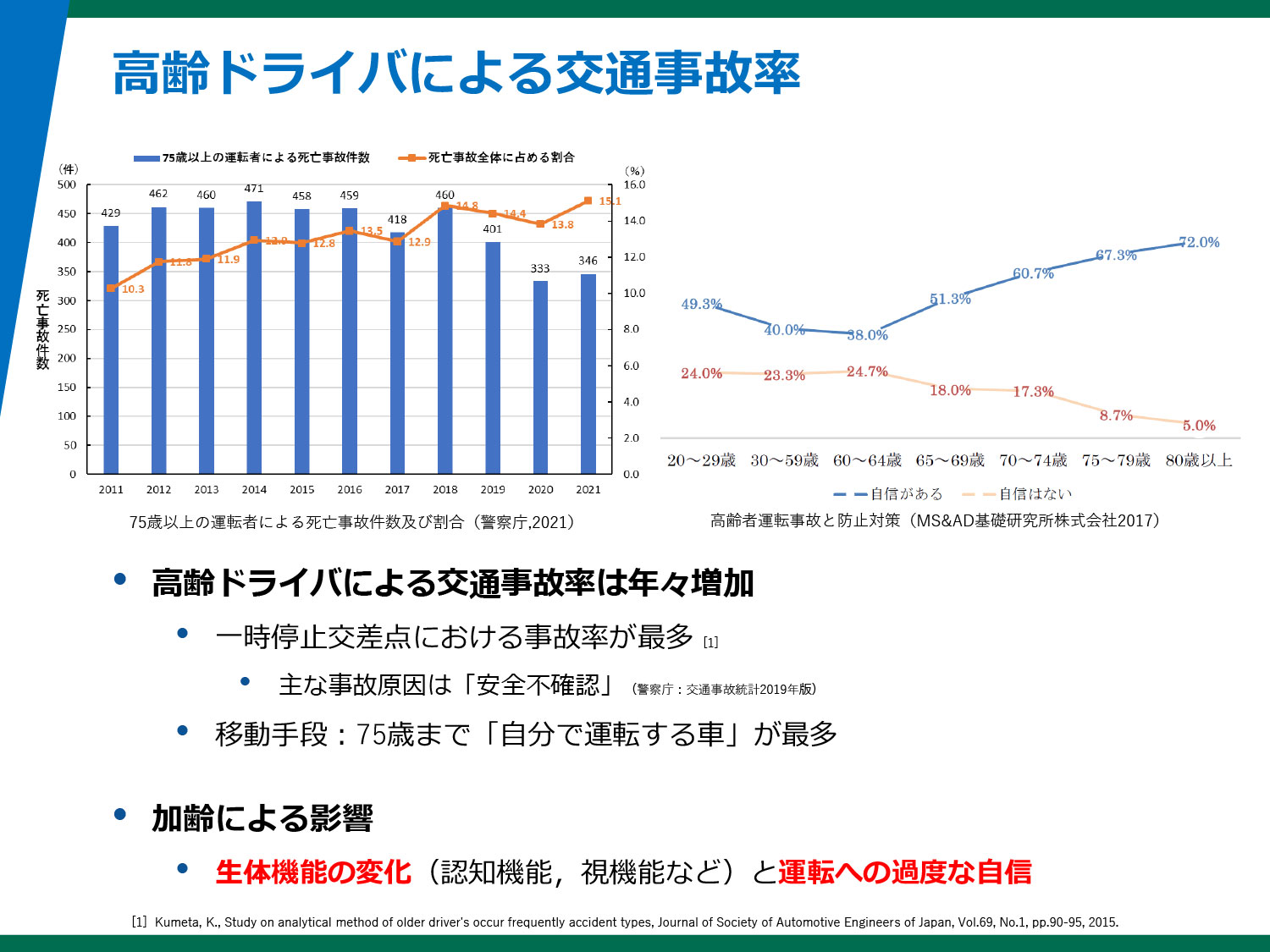
高齢ドライバーによる事故は年々増加傾向にあります。特に一時停止交差点など、街中での事故が多い状況です。「いつも来ないから見ない」といった安全不確認が原因によって事故が起きています。75歳くらいまでご自身で運転されている方が多く、暮らしに困るなどの理由から免許返納をしない高齢者による事故は減りません。加齢によって生体機能の変化もありますし、運転への過度な自信を持ってしまうことも事故の原因になっています。65歳を超えたところから「運転に対する自信度」が増えてきているのがグラフでもわかると思います。生体機能はどんどん落ちているのに自信はどんどん上がるので、そのギャップが事故に繋がっており、これをなんとかしないといけないと考えました。
事故をどう減らすか考える中で、1つの気づきがありました。自分自身の運転を不安定だと認識している人と認識していない人で事故のシミュレーションを行ってみたところ、生体機能が落ちていても不安定だと認識している人の方が事故を起こしづらい傾向が見えました。加齢によって衰えた機能を向上させることは難しいですが、自分の不安定な運転の部分を認識させることが事故を減らすことに繋がると考えました。
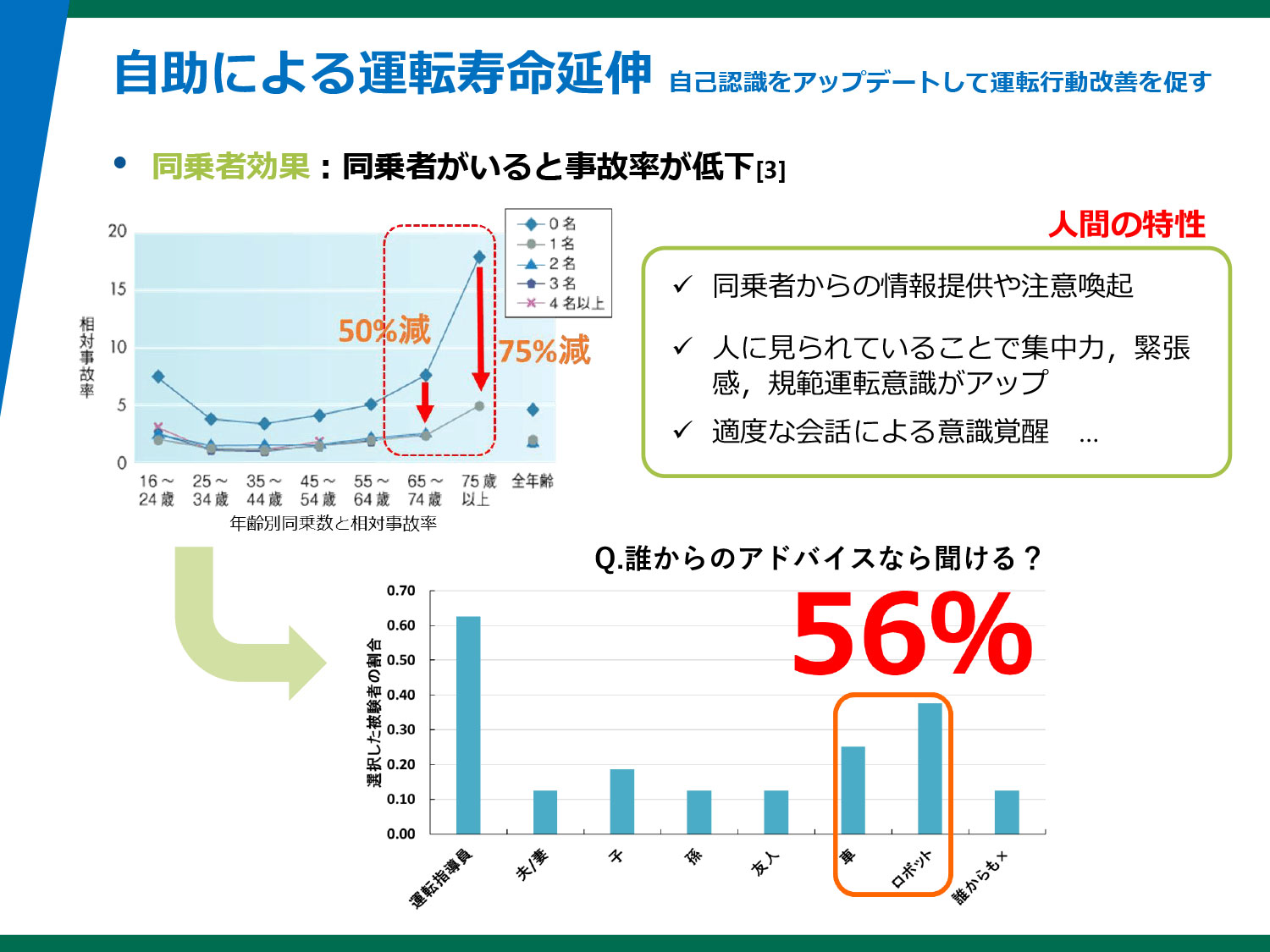
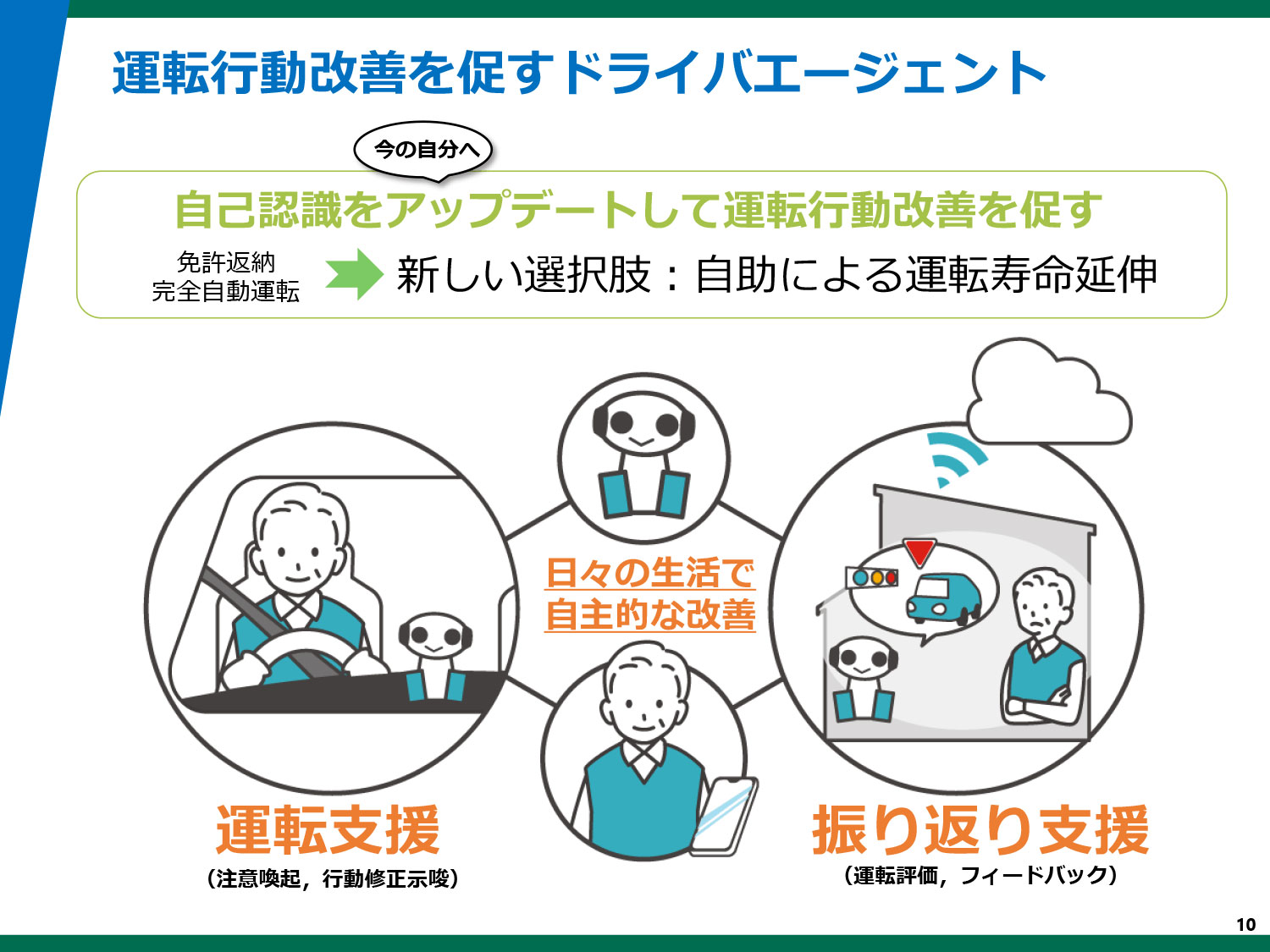
そこで自助による運転寿命、つまり長く安全に運転できる技術がある状態をどうしたら保てるかの研究を行いました。そこで特に着目したのは、同乗者がいると事故率が低下する、同乗者効果です。これは高齢になればなるほど顕著で、同乗者から「自転車きてるよ」などの声かけがあることで注意できますし、また人の目があることで「いいところを見せたい」といった見栄が働き、集中力が高まります。また適度な話も効果的ですね。では誰にアドバイスをされたいか?という質問では近しい存在だと素直に聞けないという結果がでました。逆にロボットなど機械であると素直に聞きやすいという話がでたんです。
しかしロボットを行動変容が起きるまで使い続けてもらえるかどうかが重要です。電源を消してしまったら終わりですからね。「こういう運転が危ないですよ」と声かけがなされるわけですが毎回起こるわけでもなく、また事故が起きるわけでもないので「うるさいな」と感じて使わなくなってしまう可能性もあります。
しかし「何故、そういうことを言うのか」がわかれば「いつもありがとう」の対象になるのではと考えました。自分がこういう状況ならこうされると嬉しい、と考え人間は行動しますが、実は相手に感情があると思う対象に対しては人間以外にも同じ行動をとります。
例えば猫がドアの前に座っていて自分の方をみていたら「ドアを開けてほしいんだろうな」と思って、ドアを開けてあげたりします。そこで顔のあるロボットが「危ないよ」と伝えることで、きっとこういう感情で言ったんだろうと推測ができるようになります。これを踏まえて擬人化インタフェースに注目しました。
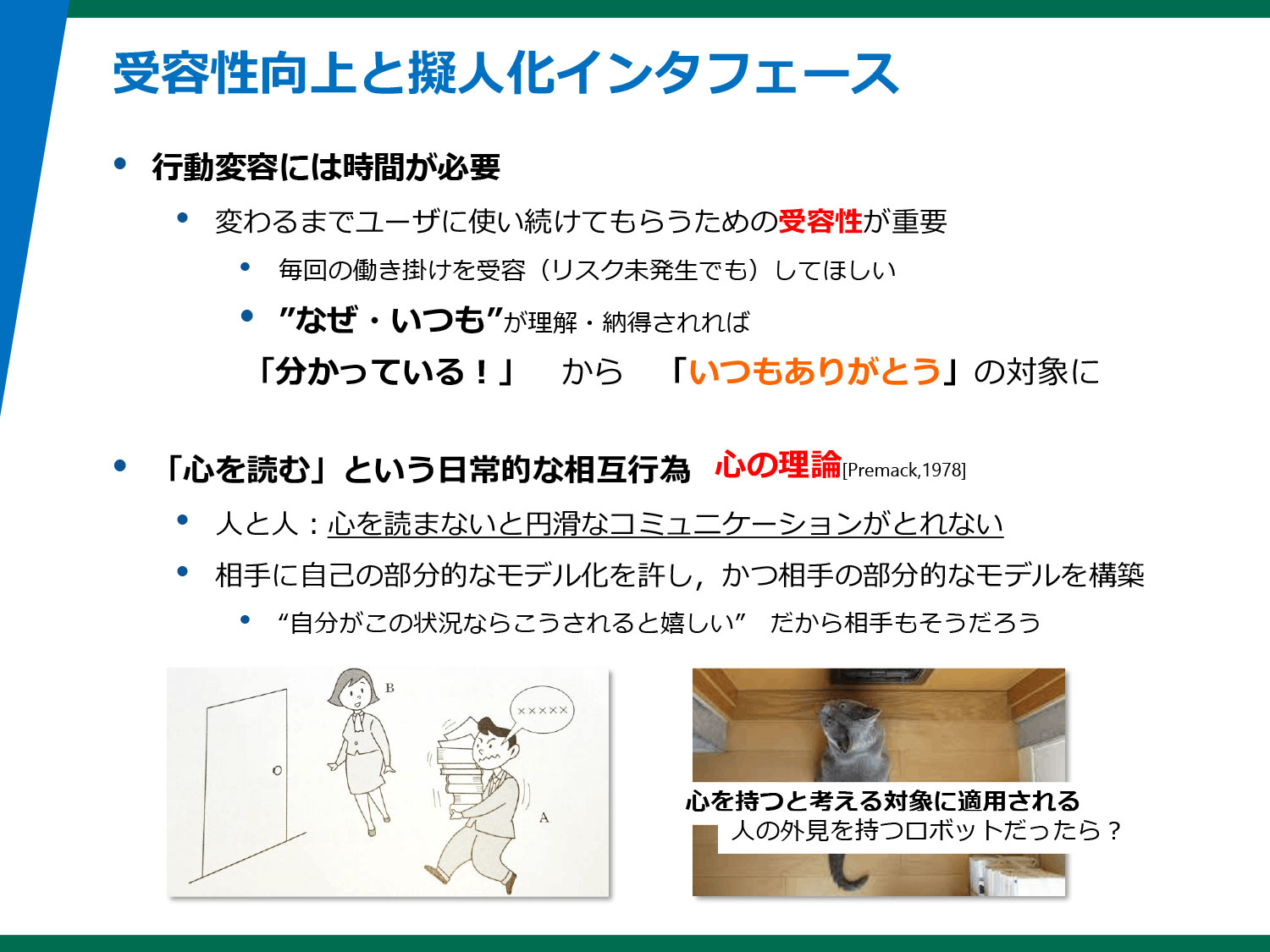
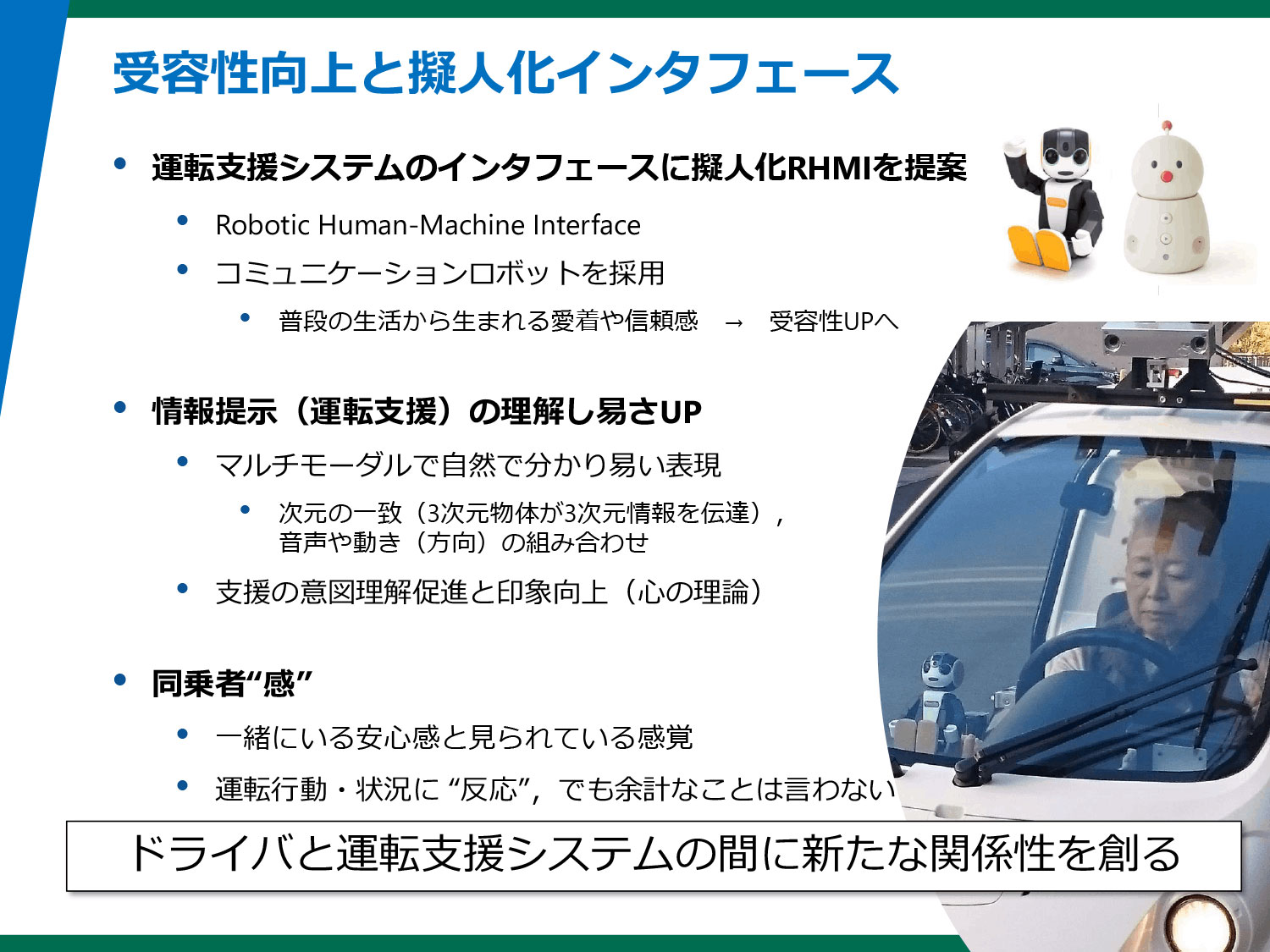
カーナビがしゃべるのではなく顔がついたロボットがしゃべること、また普段の生活から親しんでいる存在に対して生まれる執着や信頼感があるということで受容性向上のためコミュニケーションロボットを採用しました。車専用ではなくて、普段から一緒に暮らしているロボットであることが重要なんですね。また、人とロボットは同じ3次元にいます。同じ次元にいるのが直感的に訴えかけるのに大事な要素になります。また同乗者“感”があるのも大事です。ドライバーと運転支援システムの新たな関係性を作ると言うのが今回の大きな研究の目的になります。日々の生活の中でゆるやかに自己認識をアップデートして運転行動の変容を促しています。
この仕組みは既存で売られている車に後付けシステムとして使えるように開発しました。基本はスマホのアプリがハブになっていて、スマホから映像やGPSなどの情報を取得しクラウドに送り、そこで処理した情報をロボットに支援内容としてしゃべってもらうようになっています。
状況を見てロボットから「ちょっと早いね」「もうすぐ一時停止だよ」などの声かけがされます。一時停止する機能は地図情報を元に実装されています。カメラで認識しようとするとラーメン屋さんのマークを一時停止と間違えてしまったり、木や駐車車両などで映像的に見えない部分というのがあるので、地図とGPSを活用しています。
今もカメラによって物体認識はしていますが、そのデータをクラウドに送って処理しているのでは間に合わないので、そのうち車に搭載されたセンサーとの連携ができれば、急な飛び出し等に対応することもできるようになります。
青木:
ドライバーとロボットが同じ方向を向いているっていうのも重要なポイントなんでしょうか?
田中:
そうですね、心理学的に人間は自分の方に顔が向いているとそちらに気を取られてしまいがちです。視線を交差させないことも大事ですし、一緒に運転してる車に乗っている同乗者であると感じやすくすることが非常に大事ですね。
鈴木:
乗ってる時のロボットからの発話だけじゃなくて、運転が終わった後に振り返りで運転の様子がどうだったかをしゃべる「振り返り支援」は最初から必要だと思われてたんでしょうか?
田中:
大体車の中で何か言われても余裕がなく「聞けない」状態になってしまっているのですが、車を降りると客観的な視点に戻ってアドバイスを聞きやすい状況になるんです。運転のような集中しなければいけない余裕がないときに何か言われても「あとで!」となりますが、気持ちに余裕がある時に言ってもらえると受け入れやすいですよね。やっぱり運転行動を変容させていくには、聞いてもらうのが大事だと思い振り返り支援を入れました。特に高齢者の場合は、振り返りで改めて言うことで「そういえばそんなことを言われていた」と気づいて行動変容に繋がる結果になりました。
田中:
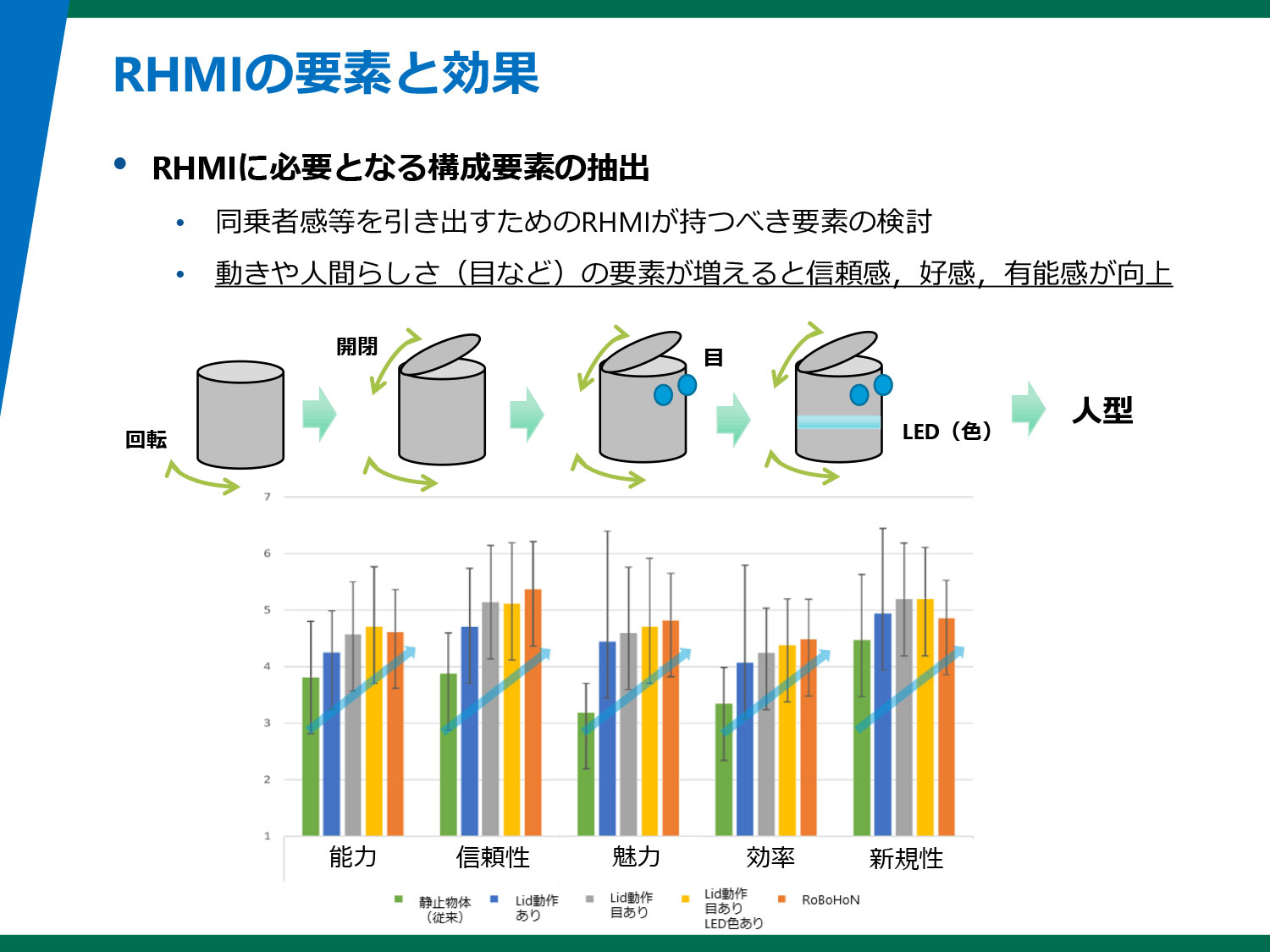
実際に3次元にいるロボットがいることで行動に変容があることがわかり、それを私たちはRHMI(Robotic Human-MAchine-Interface)と呼んでいます。RHMIに必要な構成は何か調べた結果、何かピコピコと動く部分があり、目があるものの方が信頼性が高まる結果になりました。これが人型になったらいいかというとそういうこともありません。
また車の速度などを調整してくれるADAS機能がありますが、これにRHMI要素を取り入れる動きもあります。右から車きていますよって前方のミラーに出ても中々読まれない、気づかない可能性があるんですが、これが同乗しているロボットがチラッとそっちを向くだけでも、そっちの方を確認するきっかけになるんですね。
運転中の脳血流をとったりすると、RHMIにした方がリラックスして運転できたり、危ない箇所で集中したり眠気が抑えられた状況で運転できていることがわかりました。長く運転しているとイライラしてしまうことがありますが、ロボットがしゃべってくれることでそのストレスが解放される効果もあります。
さらに今後、自動運転レベルが上がってくると、運転をサボってしまうことが起こりえます。ただ自動運転中でも基本的にはしっかり前を向いていなければいけません。そういった場面でもロボットがうまく働いてくれると期待できます。高速道路の渋滞緩和に向けた取り組みなどでも試しているところですね。

青木:
今回の実証実験に使われたユカイ工学のコミュニケーションロボット「BOCCO emo」は、スマートホームの標準規格となったMatterにも対応して、CES 2023でInnovation Awardを受賞しました。田中先生からドライバー支援プロジェクトについて紹介していただきましたが、BOCCO emoプラットフォームではこれまでにも健康支援や子育て支援など、様々な企業とコラボしてサービス提供を行ってきました。

鈴木:
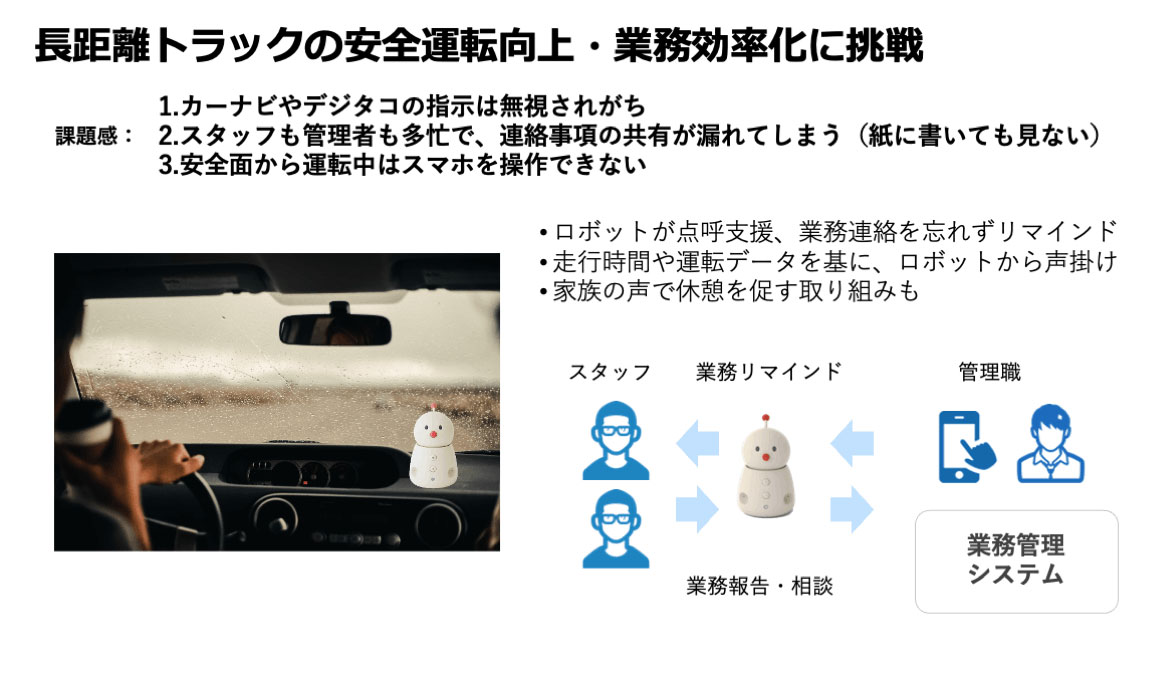
BOCCO emoと車を組み合わせたサービスをいくつかご紹介します。1つ目は、長距離トラックの安全運転向上・業務効率化です。これまで配送のための長距離トラック運転において、管理側も運転側も多忙なため連絡事項の共有漏れや、スマホで連絡しても運転中は見られないなどの課題がありました。
そこでトラックにBOCCO emoを搭載して、スタッフの点呼や業務連絡伝達を行う取り組みを始めました。またBOCCO emoが搭載されていることで走行時間や運転データを元に体調面を考慮したロボットによる声かけができるようになっています。この声かけも「そろそろ休んだら」など家族の声をあらかじめ録音しておくことで、行動変容や働く環境改善にも繋がっていくと考えています。管理側としてもスタッフが連絡することなくデータを取得できるため、効率化が進みました。
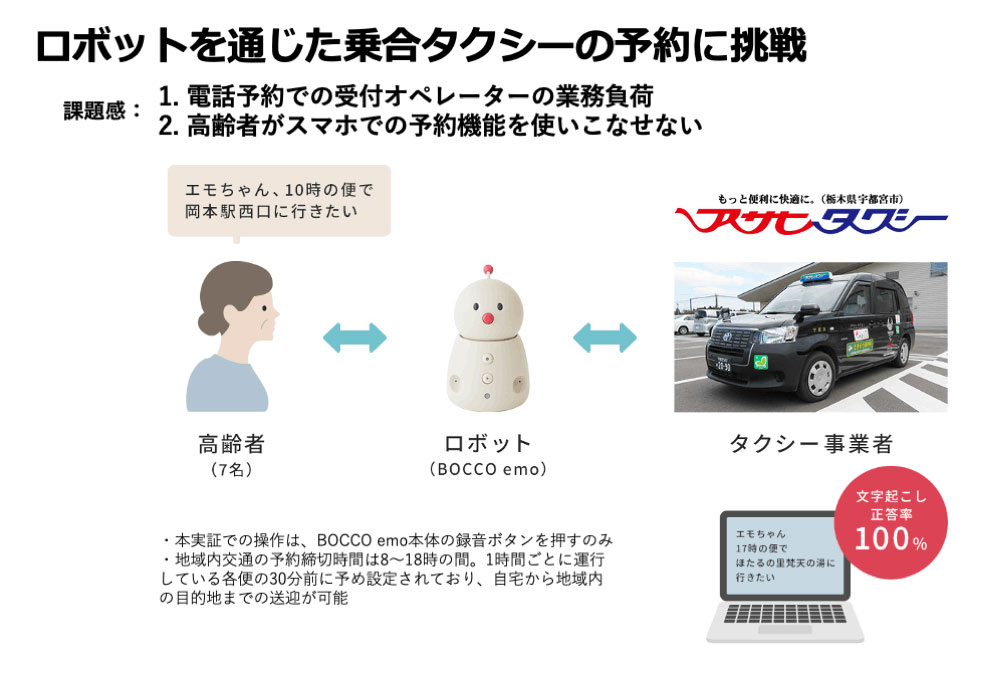
2つ目は宇都宮市と取り組んだモビリティサービス(MaaS)とBOCCO emoの連携です。宇都宮市では高齢者向けに乗合タクシーサービスを提供していました。これまではスマホや電話から予約ができるようになっていたのですが、利用する対象者がスマホの予約機能を使いこなせない、また電話予約だと受付オペレーターの業務負担が増えてしまうといった課題がありました。
そこで高齢者の自宅にBOCCO emoを置き、BOCCO emoに対して例えば「エモちゃん、10時の便で岡本駅西口に行きたい」とタクシー手配の声かけを行うと、それが管理側のシステムに自動で文字起こしされて、予約が完了するといった実証実験を行いました。10日間の実証実験で16件の予約利用があり「スマホと比較すると予約が圧倒的にしやすい!」といった声があがりました。
またタクシー予約にBOCCO emoを使うだけでなく、宇都宮市の天気情報やモーニングコールなどの機能をあわせて使ったことで、BOCCO emoに対する親しみを感じ、よりサービスを活用しやすくなったと考えられます。
BOCCO emoプラットフォームを利用した既存サービスとの組み合わせた新規事業開発、また課題解決を圧倒的にスムーズに進めることができるため、全国の自治体や企業と共に、さらにコミュニケーションロボットの活用について展開していきたいです。
鈴木:
事前にいくつか参加者の方から質問がきているので、田中先生に答えていっていただきたいとおもいます。
「インターフェイスが3次元である必要はあるのか?その場合はどんなデザインがいいのか」という質問です。
ロボットではなくてもアプリなどでも可能ですが、人がロボットと会話をしたり話を聞くことにどんな意味があるんでしょうか?

田中:
ロボットはそこに“いる”わけですよね、それがすごく大きいと思います。例えばよく比較されるんですが、モニターで声かけされたとしても、あくまでそれはモニターの中の世界なんですね。
よく【次元の一致】と言われるのですが、例えばロボットが右を向いたら私たちも「右に何かあるぞ」と思って見るんですよね。でもモニターの中の人物が右を見ても、それでどこに何があるかは私たちには瞬間的に理解はできません。案内を出す存在の次元がどこにあるかで、そのわかりやすさが異なります。ロボットが運転席にいても煩わしさを感じないのは、自分が意識して見なくてもわかるからなんです。視界の端にロボットがいて動いていることが感じられて、動きの様子にあわせて「何かを伝えようとしている」ことを察することができるので、スムーズにその声を聞くことができます。ですのでいるかどうかというのは非常に大事ですし、私としてはこれが早く当たり前になってほしいと思っています。
またデザイン、ロボットの顔をどうするかは欧米でも課題になっています。目のデザインによって、そのロボットが信頼できるかどうかという部分に影響が出てくるんですよね。また目があることで「どこを見ているか」がわかるので、人間とロボットで【共同注視】が成り立つこともという効果がありますよね。
青木:
BOCCO emoの頭についている赤い「ぼんぼり」は感情表現を表して動きますが、これはQooboというしっぽクッション型ロボットを開発している時、「ふりふりしてるのって魅力的だよね」とインジケーターとしてつけた機能だったんですよ。
田中:
そういう感情を伝えるものって非常に大事ですよね。
鈴木:
次にいただいた質問は「ロボットの置き場所はどこがいいのか?」です。
車載ロボットによるディストラクション(運転の妨げ)を軽減するための考え方はいかがでしょうか?
田中:
我々も行政や警察と話しているのですが、カーナビなどの設置方法に準拠するということを話しています。その中には計器類を隠さないルールがありますし、前方風景(視界)に入っていることが大事です。角度や大きさ、また車によってはエアバッグが出てくる場所などに注意するといった形ですね。
鈴木:
走る速度や環境によってロボットに求められる要素は変わるのでしょうか?
田中:
運転のリスクという点で考えると、高速道路って車しかいないわけですからリスクが少なくなるんですよね。ただ注意する点が減るとドライバーがやることがなくなり、やることがなくなると寝てしまう結果などを引き起こすので、それを防ぐっていう方向に支援を変えていくのが大事ですね。
ちゃんと見なさいよという支援だとドライバーと喧嘩になるので、そうではなくて周りに意識を絶やさない仕組みをいれてあげる感じです。また高速の出入り口を間違えることもありますので、そういう点も注意喚起する必要があります。街中であればリスクが多いので、そうしたリスクに対して呼びかける形になりますし、環境によって求められるものは変わりますね。

鈴木:
社会実装に向けて期待したいことはありますか?
田中:
今回は高齢ドライバーの支援というところからプロジェクトがスタートしていますが、運転が久々な人や初心者ドライバーなど色んな方に対応ができます。ドラレコやカーナビなどを作っている企業と連携することでもっと豊富な支援が実現できると思っています。
またドライバー支援だけでなく、タクシーやバスに取り付ける選択肢もあると思います。例えば路線バスの料金箱の上にBOCCO emoがいて、料金を伝えてくれたり料金を入れるとお礼を言ってくれたりするだけでも気持ちいいコミュニケーションができますよね。
これを使ったことで少し優しい気持ちになれる部分にうまく適用していけたらいいのではと思っていますし、そうした取り組みを一緒にしてくださる企業や団体がいたら一緒にやっていきたいです。

名古屋大学 未来社会創造機構 特任教授
田中 貴紘
2006年 東京工業大学大学院 博士課後期程修了、博士(工学)。2014年より名古屋大学 特任講師、特任准教授を経て、現在に至る。人と知的人工物間の共生に向けたインタラクション研究に興味を持ち、ロボットを介した運転行動変容などに取り組む。研究成果活用のため、2020年に名古屋大学発ベンチャー 株式会社ポットスチルを創業。
ユカイ工学CEO
青木 俊介
東京大学在学中にチームラボを設立、CTOに就任。その後、ピクシブのCTOを務めたのち、ロボティクスベンチャー「ユカイ工学」を設立。「ロボティクスで、世界をユカイに。」というビジョンのもと、家庭向けロボット製品を数多く手がける。2015年よりグッドデザイン賞審査委員。2021年より武蔵野美術大学教授。
家族をつなぐコミュニケーションロボット「BOCCO」、共感するファミリーロボット「BOCCO emo」、しっぽのついたクッション型セラピーロボット「Qoobo」、小さなしっぽクッション「Petit Qoobo」エデュケーションシリーズkurikit「ユカイな生きものロボットキット」などを発表。
ユカイ工学株式会社
COO 鈴木 裕一郎
外資系IT企業、コンサルティング会社を経て、SaaS型サービスを提供するスタートアップ企業に転じ、執行役員・COOとして成熟市場の法人営業、チームマネジメントを担当。2018年からユカイ工学へ参画し、BOCCOシリーズを中心とした法人営業を統括。根っからのBOCCOユーザー。
IoTシステム開発や
ロボット活用・開発のお困りごとは
ユカイ工学にお任せください